自动化应用复合式大力抓取气缸
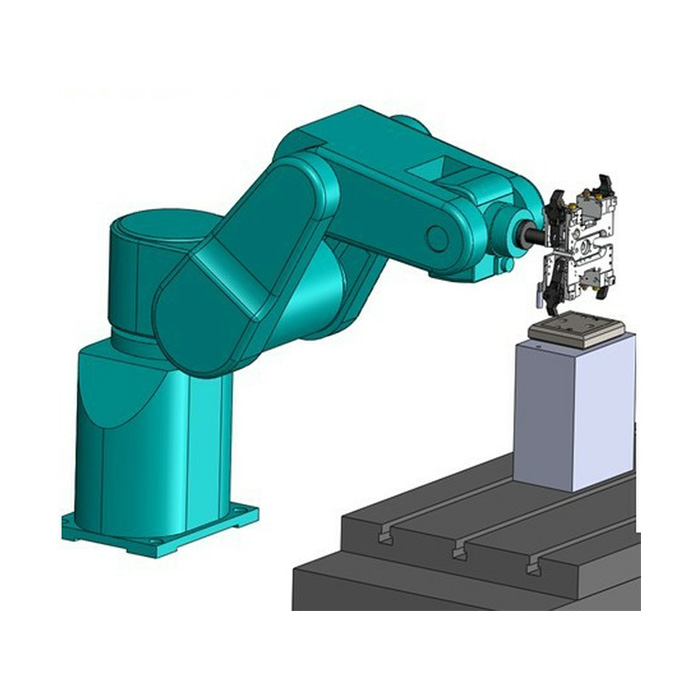
本公司自主研发制造发明涉及一种机器人专用用复合式气缸(配自动提治具器/无自动提治具器,-两种)
长期以来,市场上流通的手爪机械气缸(大力)。适用于常规的普通生产作业,但在[敏感词]手机行业的加工或一些结构复杂零件抓取时就表现出笨重或不适应的问题,气缸体的后编辑限制性强或不可以编辑等。
尤其是在轻载机器人(5公斤)的手爪手机行业设计中表现出缺陷有:1.机器人手爪重量达到或超过使用极限。2.无法根据需求编辑气缸体的定位销位或根据需求的感应器位置确定等。3.抓取力选型增大后手爪重量也随之增大的问题。
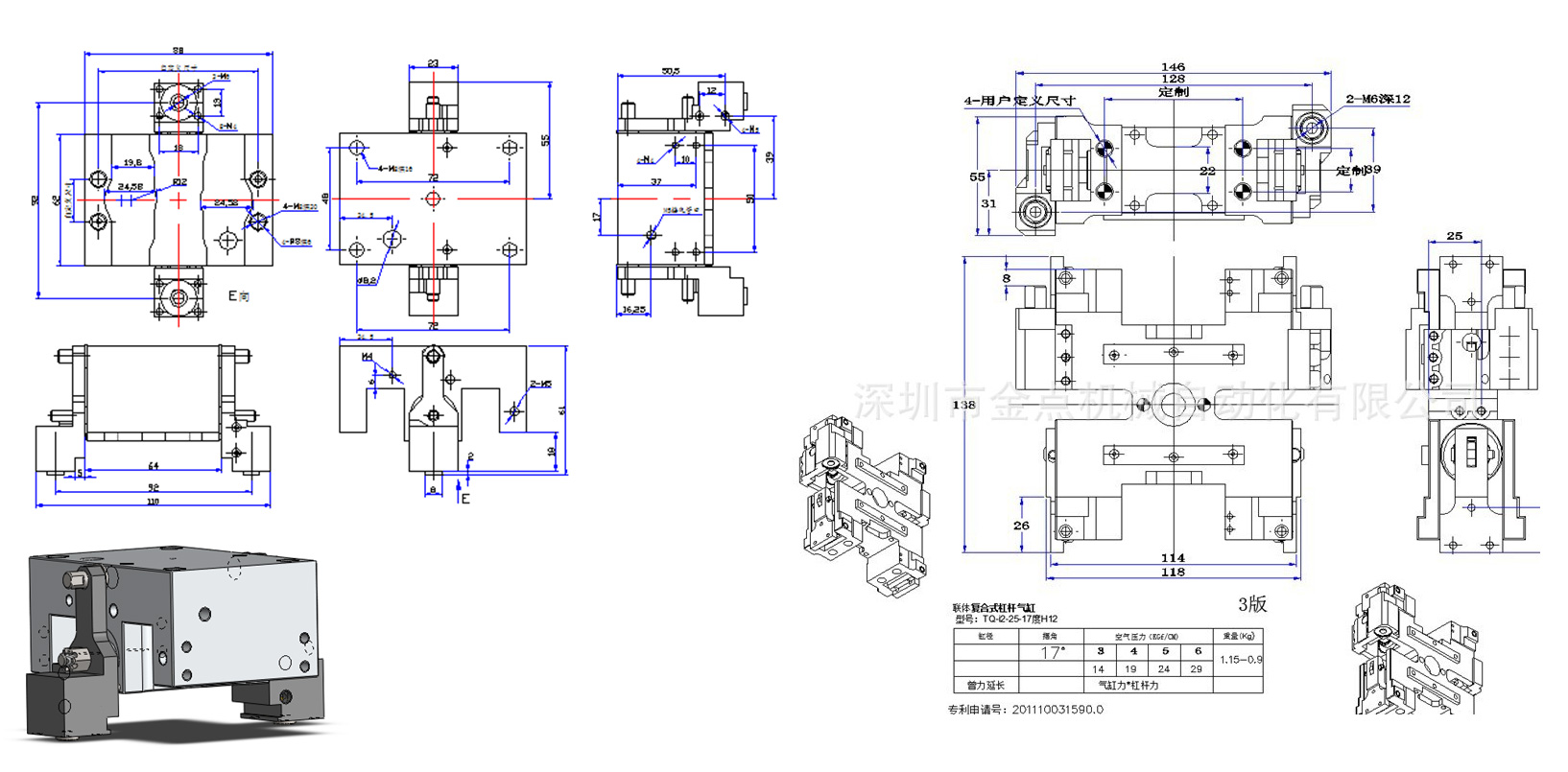
该发明是以两个气缸杆同步向两方向推出缸径应有力再乘上钳爪缸杆力的方法在不增加气缸体积与重量的方式下达到大力抓取的目的。这种气缸的体积小抓取灵巧、重量轻、气缸体可以根据需求编辑避位口或销钉孔位,适应机器人手爪高精度定位抓取工作。
气缸可以根据需要在钳板限位板上,加装两个撑起气缸,伸出的两个缸杆轴设有安装螺纹孔,可以根据需求设计顶起柱。需要时两个撑起气缸同时动作,可以把治具体在高精度配合的销钉上分离出来,不会使机器人因超负荷造成跑点位撞击或抓伤产品等现象。
所有机器人周边设备都可以根据实际应用设计制造。
Add: 122, No.1 Dongfang Community, Songgang Street, Bao'an District, Shenzhen
Tel : 131 8972 1285




Copyright © Shenzhen Jindian Machinery Automation Co., Ltd All Rights Reserved